Engineering Design Process
Step 1- Identify Problem
-Find a problem
Step 2- Research the Problem
-Learn more about the problem and ways to solve it
Step 3- Develop Possible Solutions
-Create several possible solutions
Step 4- Find Best Solution
-Choose the best possible solution
Step 5- Make a Prototype
-Build your solution
Step 6- Test Prototype
-Test your solution
Step 7- Communicate the Solution
-Publish your all work to your site
Step 8- Redesign if Needed
-If possible, improve your solution
-Find a problem
Step 2- Research the Problem
-Learn more about the problem and ways to solve it
Step 3- Develop Possible Solutions
-Create several possible solutions
Step 4- Find Best Solution
-Choose the best possible solution
Step 5- Make a Prototype
-Build your solution
Step 6- Test Prototype
-Test your solution
Step 7- Communicate the Solution
-Publish your all work to your site
Step 8- Redesign if Needed
-If possible, improve your solution
Program 1

This program makes motor ports A and B rotate in a positive direction with a power of 75 for two seconds then stops with a break. Motor ports A and B then spin 100 degrees with a power of 75 in different directions to steer the robot then they move forward once again with a power of 75 for one second.
Program 2
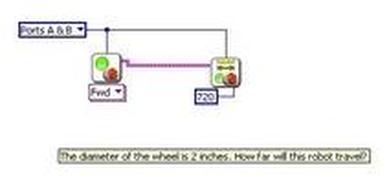
The diameter of the wheel is 2 inches. The circumference is 6.28 inches. The so if the wheel rotates 360 degrees it will move 6.28 inches. But since the wheels spin 720 degrees the robot will travel 12.56 inches which is two full rotations.
Program 3
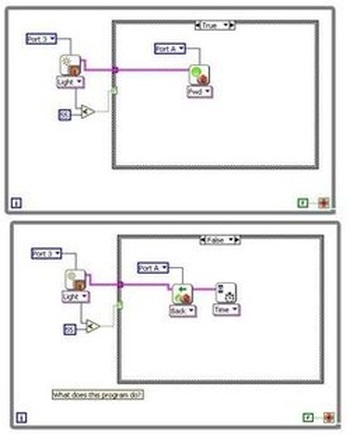
When the light sensor reads a value greater than 55 it will make the case false and makes the robot travel backwards for one second then stop. When the sensor reads a value less than 55 the case will become true and the robot will move forward. The program will continue to loop because the while loops have a false input and are set to "stop if true" which means if it had a true input they would not loop but since they have a false input they will loop.
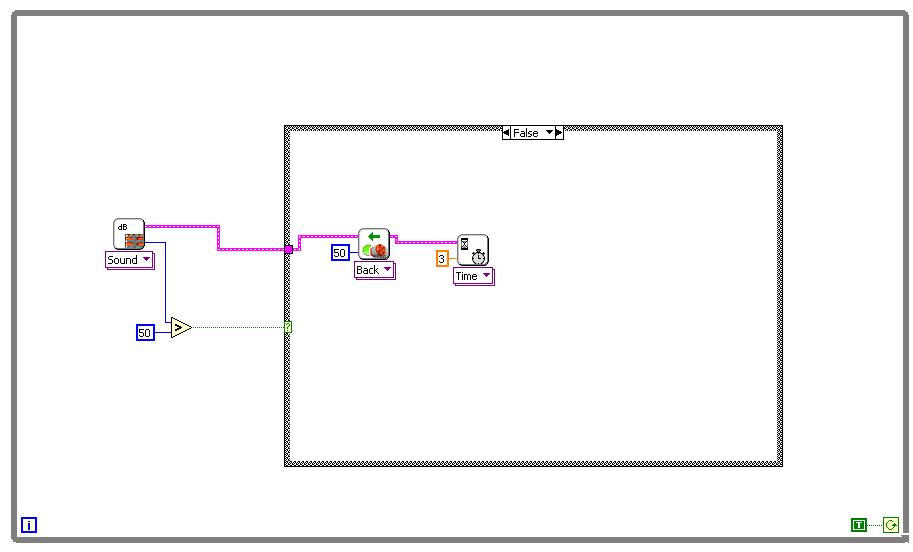
Program 4
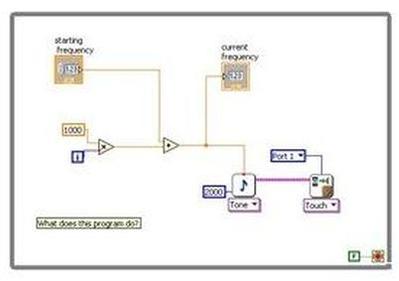
This program will increase the frequency of the tone by 1000 for each time the touch sensor is pushed.
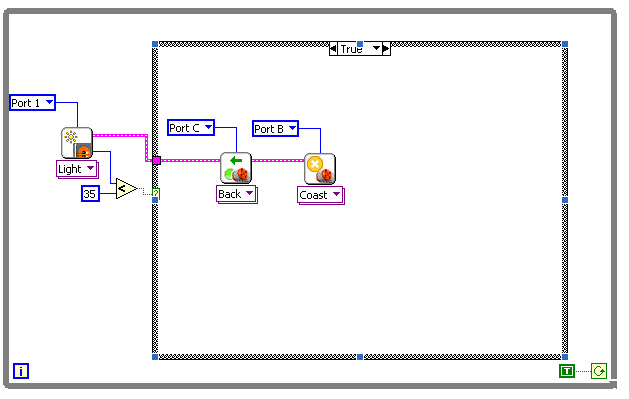
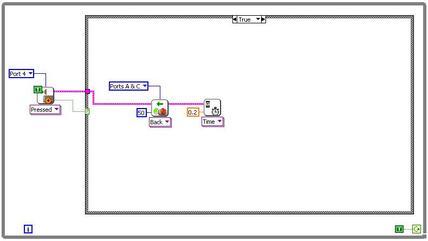
create a LINE Follower Program(True)
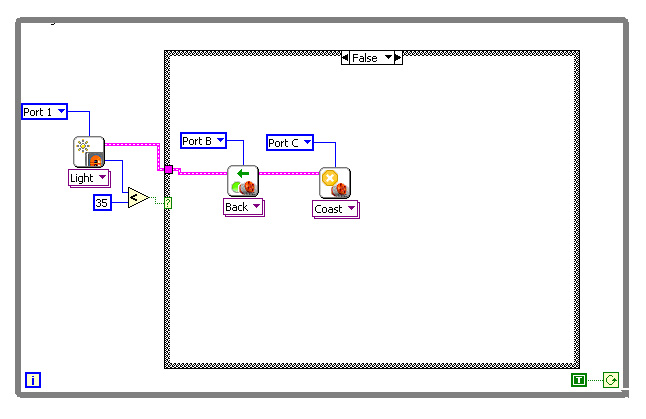
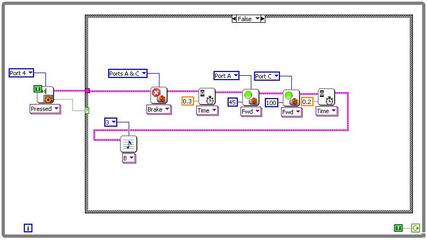
Create a Line Follower Program (False)
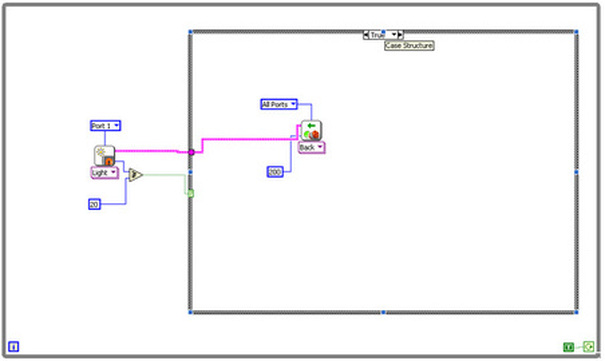
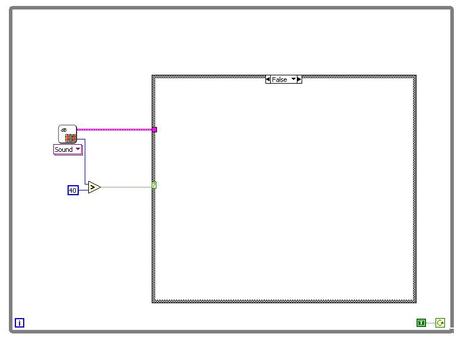
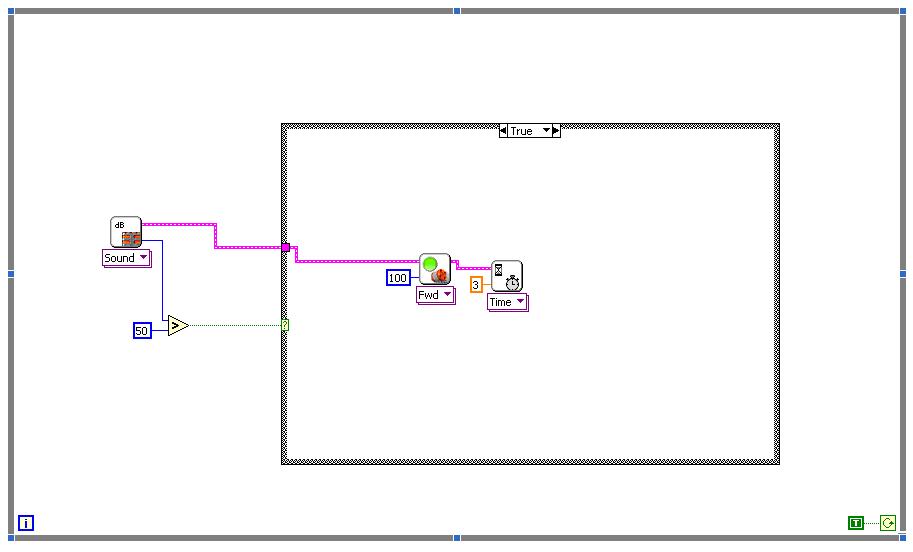
create a cockroach bot program (true)
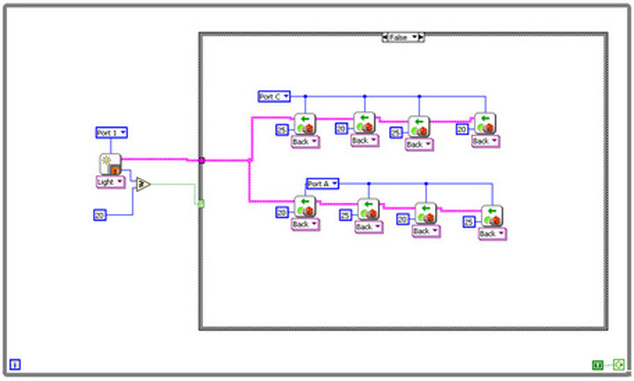
create a cockroach bot program (false)
Create a TAble Bot program (true)
Create a table bot program (false)
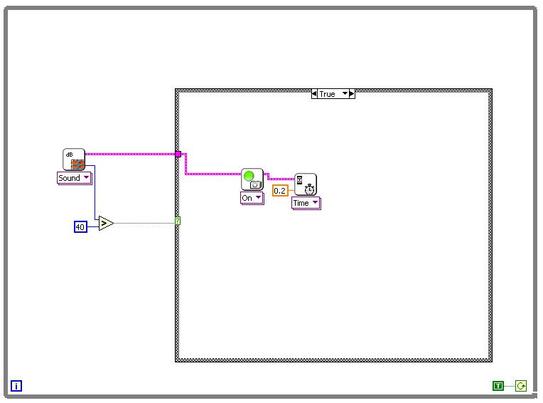
Create a thunderstorm program
Create a program for Katherine (true)
Create a program for Katherine (False)
Final Design Challenge Program (true)
Final design Challenge Program (false)