The challenge
The challenge wa to build and program a bot capable of picking up a ball and dropping it into a predetermined goal while following a line.
Input
There wasn't knowledge that was required beforehand to build and program this bot.
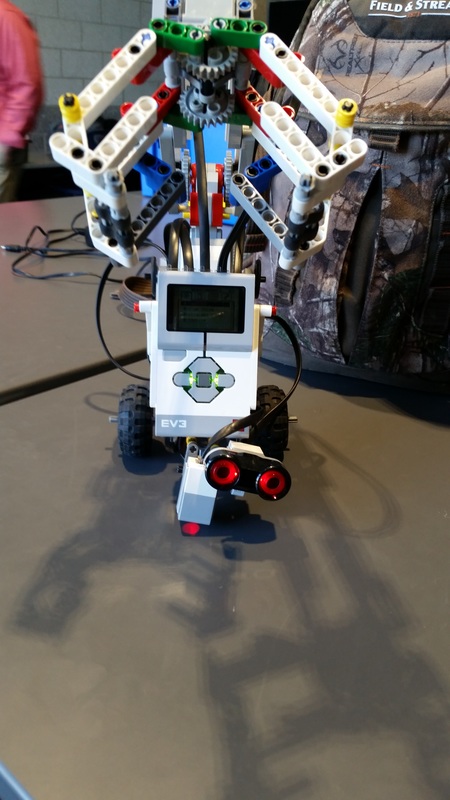
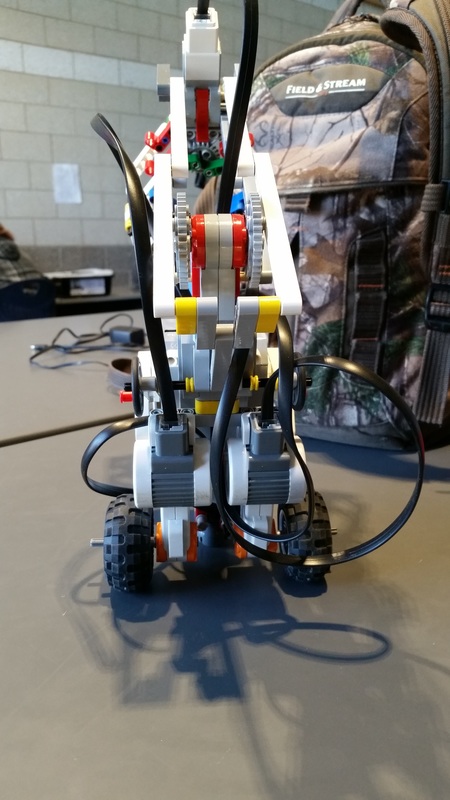
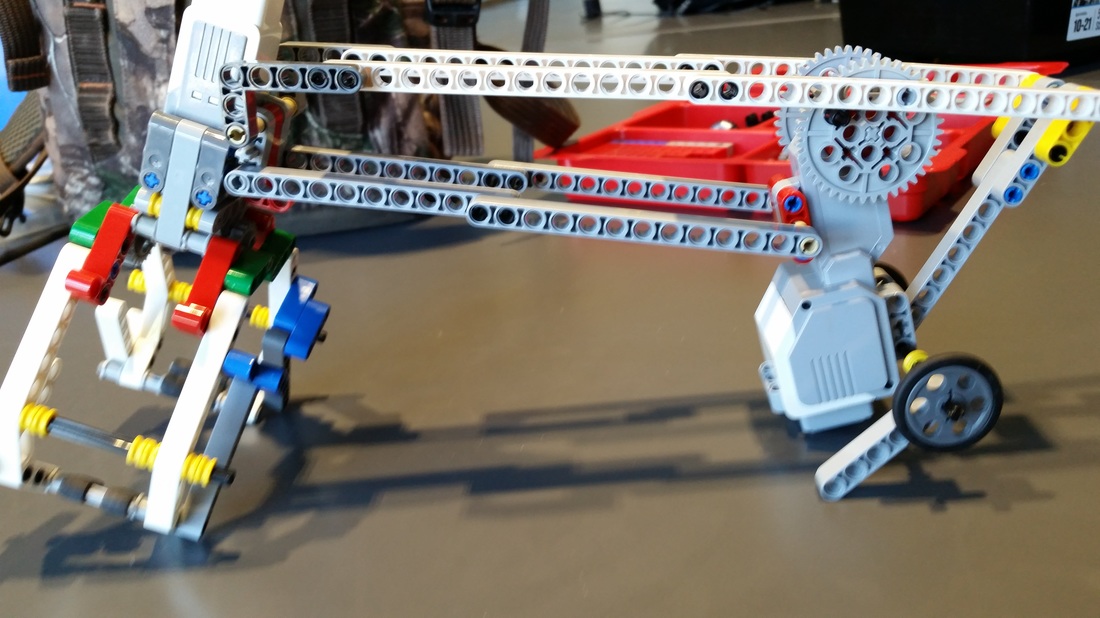
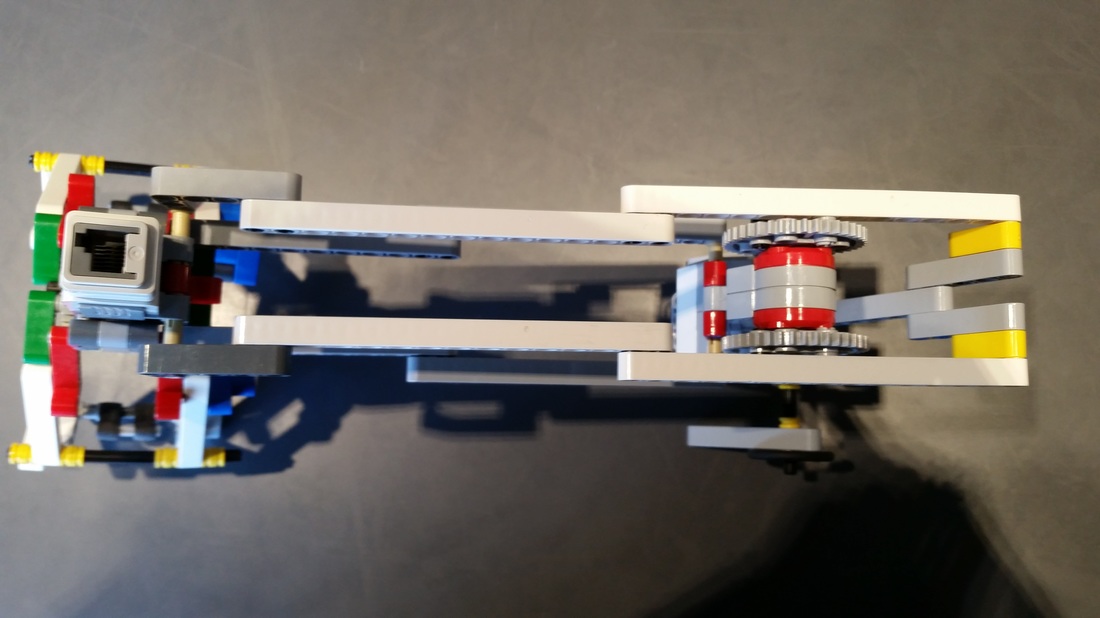
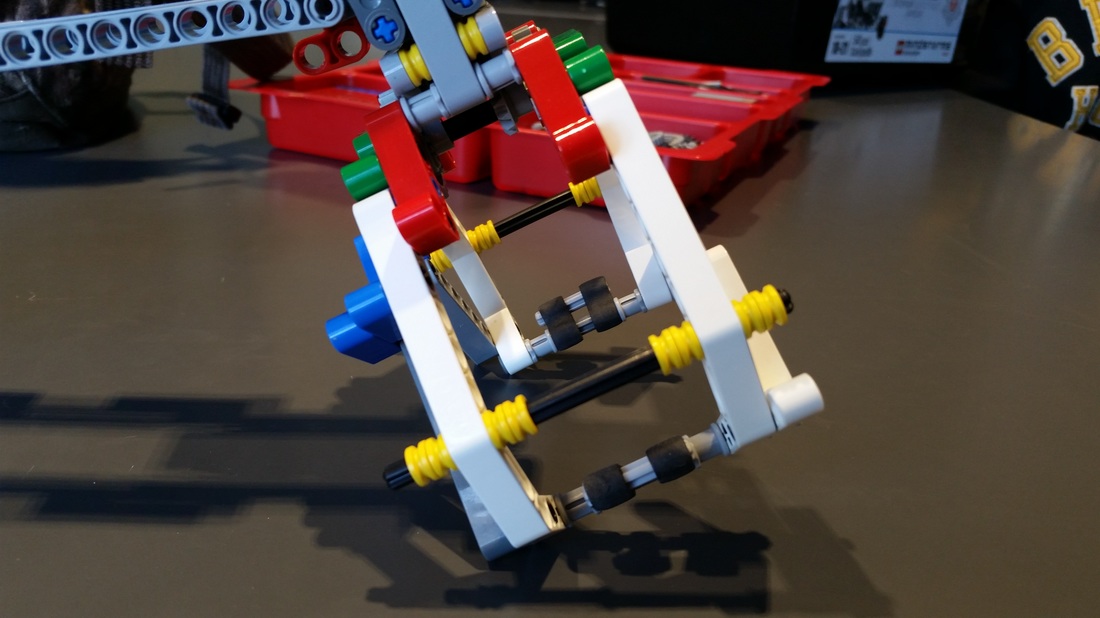
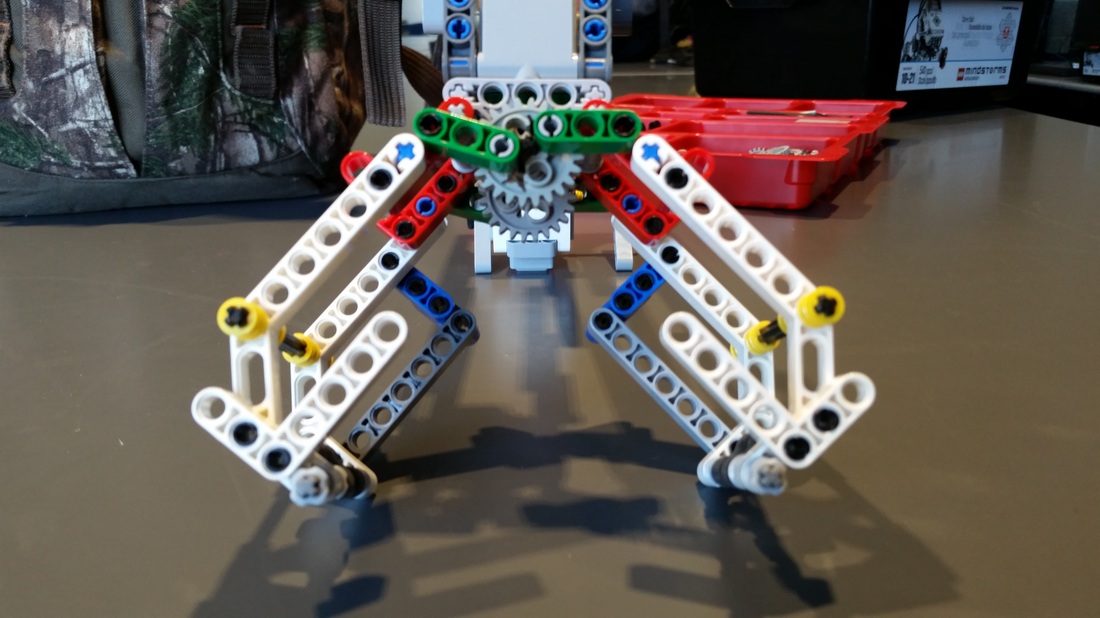
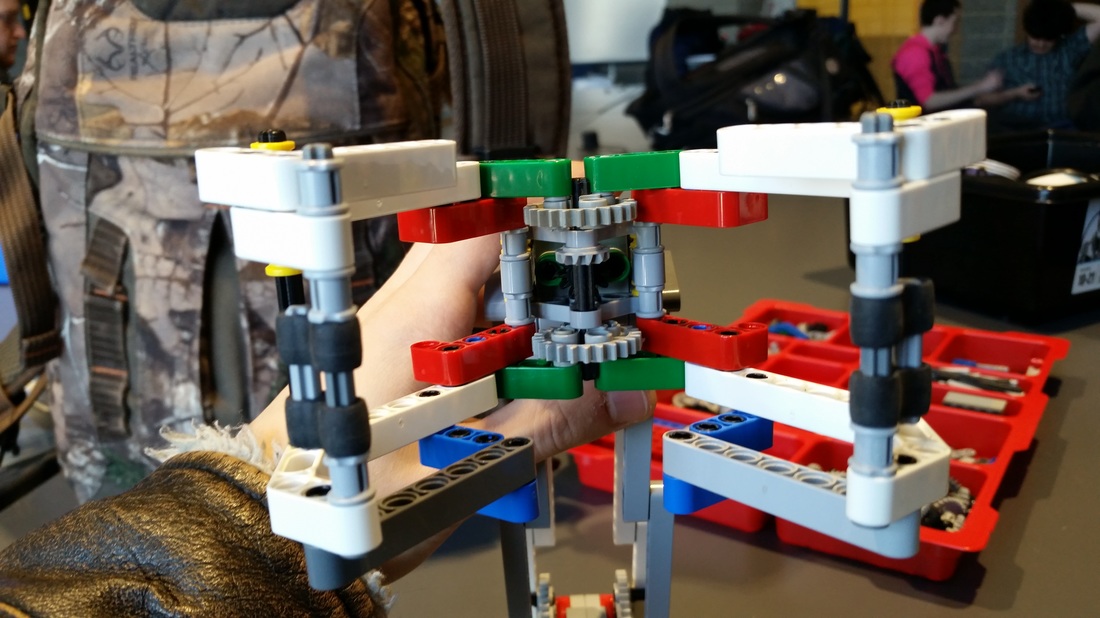
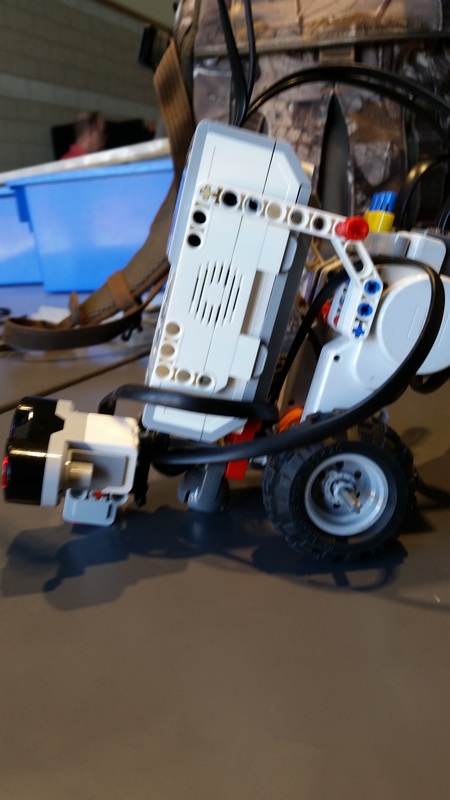
Bot prototype



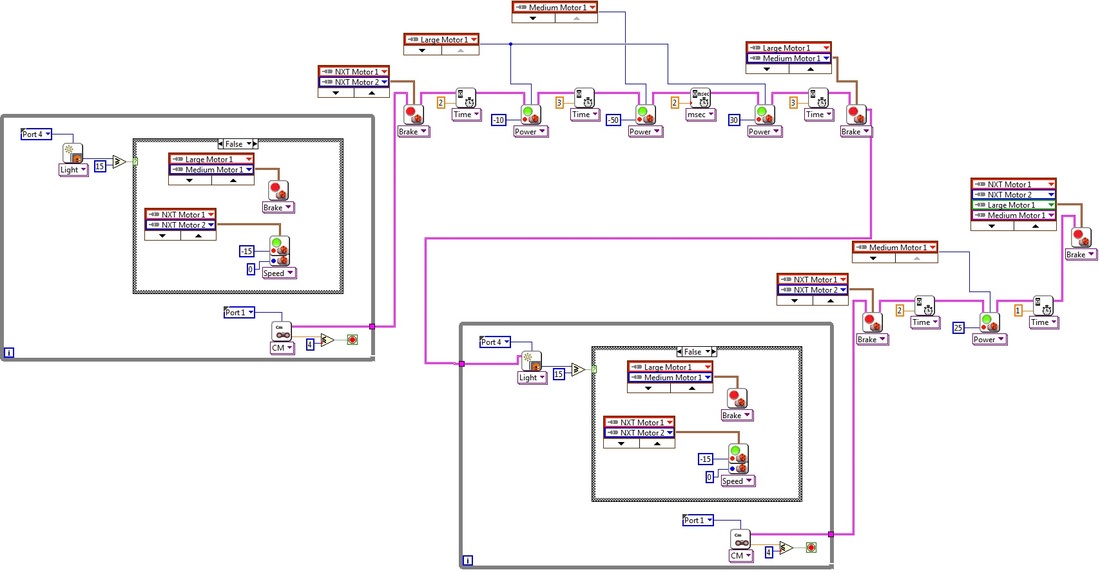
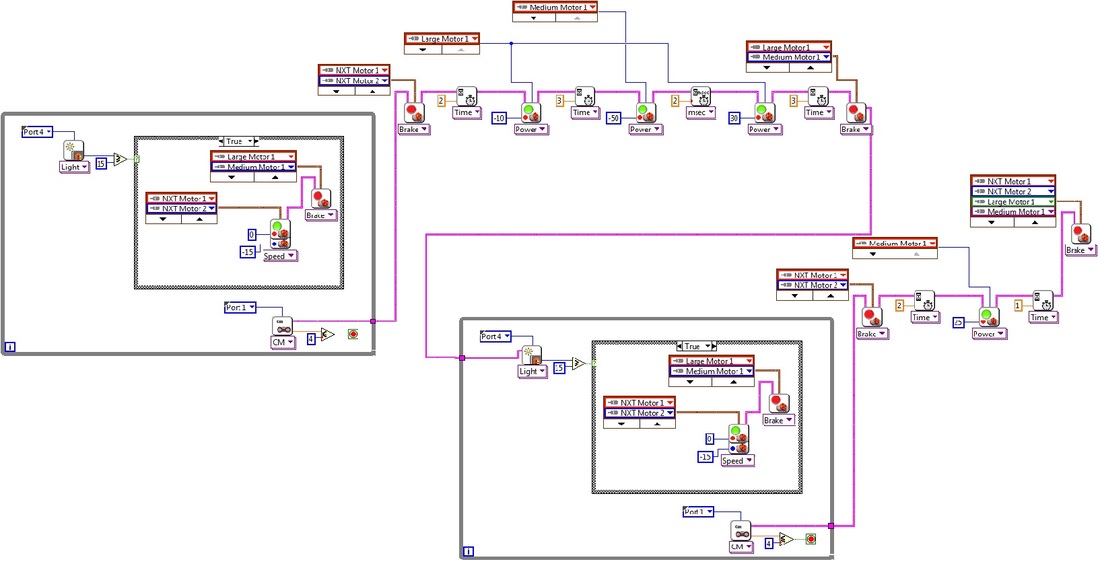
The Program
feedbackWe did not receive any feedback.
what I learnedI did not learn anything new that I did not already know when programming this bot.
what i would do differentlyThere isn't anything I would do differently with this bot.
|
At its base, the program only really has two different parts. The first is the line follower program. The light sensor is set to detect light values of 15 or greater as false. The bot will run the loop for following a line until the ultrasonic sensor detects an object at 4 or less centimeters. When this condition is met and the loop will end. The bot will then follow the next string of commands, which will lower the arm, close the claw, and lift the arm back up. Next, the bot follow line follower loop again. Once the bot gets within 4 cm, it stops and the claw opens, dropping the ball.
|