The Challenge
The Challenge was to build a bot that could move a can. The bot also had to be able to stay within the boundries of a circular line in which that can was placed.
Input Factors
We needed to know how to use loops and case structures.
Can Bot

The bot has two wheels with indepent motors and skids attached to the back to keep from falling backwards. There are two sensors attached to the bot for this challenge: the light sensor and the ultrasonic sensor. There is also a large pair of fixed claws to increase the bots reach to better push the can. Attached to the sides of these claws are support wheels to hold ou these claws as well as the front of the bot.
Program (Prototype 1)
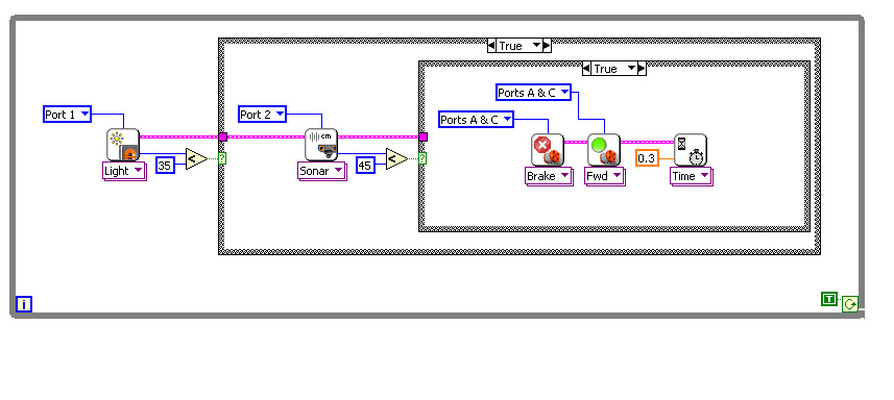
This program will prioritize the light sensor reading over all other sensor readings. When the light value it less than 35, it will be read as true and contine to follow the programing for this true reading. The same is done with the ultrasonic sensor with the exception of the value being 45 instead of 35. The bot will then brake when the sonic sensor senses an object. The bot will then procede to speed towards the ojects for 0.3 seconds.
Program (Prototype 1 continued)
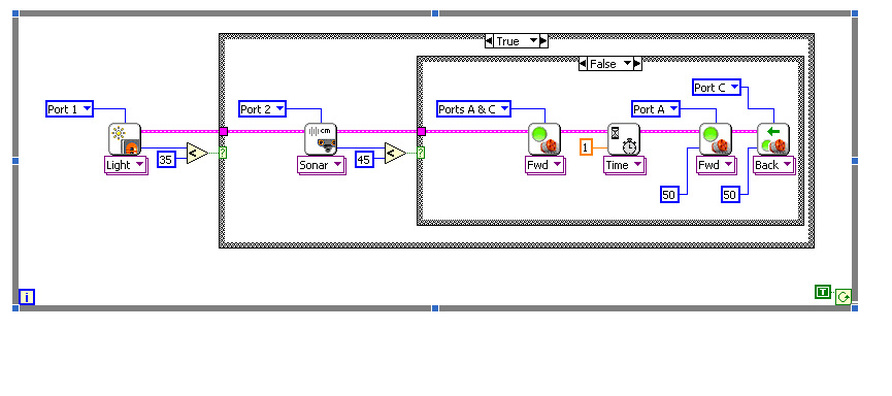
This program will prioritize the light sensor reading over all other sensor readings. When the light value it less than 35, it will be read as true and contine to follow the programing for this true reading. When the sonic sensor reads a value greater than 45 cm the bot will move forward for one second before turning in place.
Prototype 1 (Prototype 1)
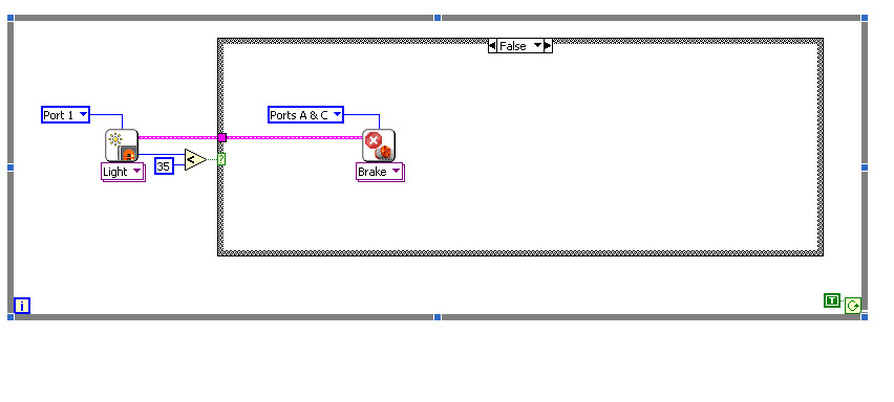
When the bot reads a light value of greater than 35 it will brake.
Final Output
The final output is a bot that is capable of pushing the can outside of the circle while stoping when the black line is reached.
Feedback
We did not recive any feedback.
What I Learned
I learned how to create more complex programs using case sturctures.
What I Would Do Differently
There is not anything I would do differently.
