The Challenge
We had to built a bot that could drive around on a table without falling off for two minutes.
Input Factors
We needed to know how to create a program that would allow for the bot to react to its surroundings acorrding to preset parameters.
Prototype 1
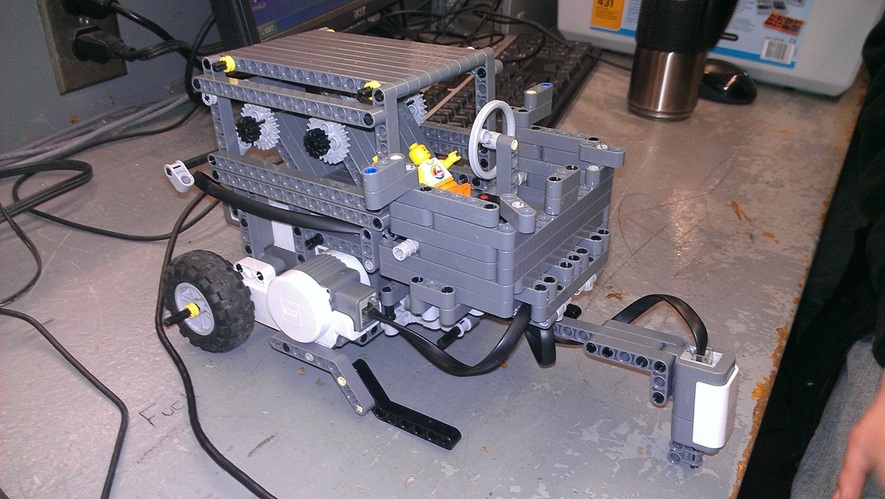
The bot has two wheels with independent motors to enable it to turn as well as skids to help support the bot even if the touch sensor goes too far off of the table.
Program (True)
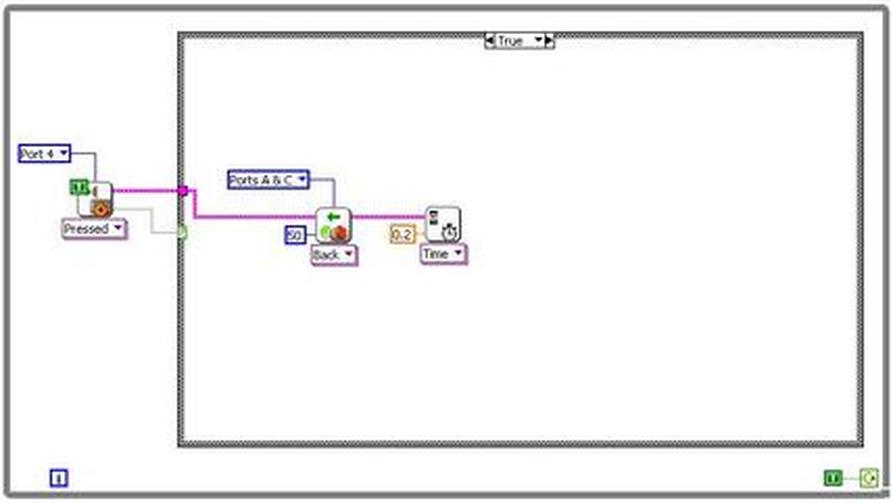
The bot will move forward continuously until the preset parameters are no longer met.
Program (False)
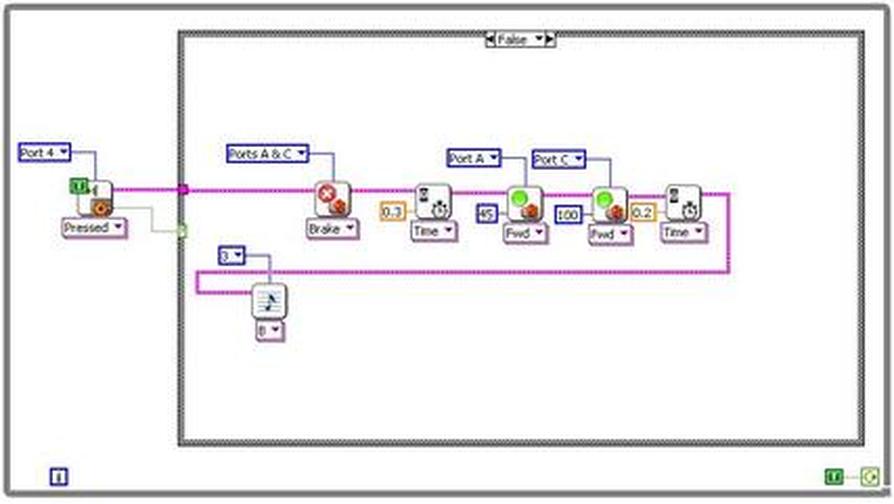
The bot will follow this program when the touch sensor is no longer in contact with the table. It will then stop and back up while playing a beeping nosie to indicate this to those nearby.
Final Output
The final product is a bot that can aviod falling off the edge of the table by detecting when the touch sensor is in contact with the table and be able to stop and back up utill the touch sensor is in contact with the table again.
Feedback
We had received feedback on how to improve our robot's program.
What I Learned
I learned how to program a bot to be able to sense ans stop itself from falling off the edge of a table.
What I Would Do Differently
There is not anything I would do differently.
