Identify and explain the function of each programming icon
1. Motor forward- This is used to run a motor forward.
2. Touch Sensor (pressed)- When the touch sensor is pressed a certain part of the program will run.
3. Timer- Can be used to have the robot do something for a certain period of time
4. Lamp on-Depending on the on or off state will send electricity to the lamp you have set up on the
port you put the lamp in.
5. Steering-This will make the robot turn depending on the way you set up the power and ports.
6. Wait for Touch Sensor- It waits for what ever button you have it set up to read to be pressed.
7. For loop- The programming inside of this will loop a certain number of times.
8. Case Structure-It reads a Boolean statement and depending on whether or not the statement is true or false it will do a different case that you have set up in the true and false. It can also be expanded into more than two cases.
9. While loop- This will continue to do whatever is inside of the loop while the boolean statement at the bottom right hand of the structure is true.
10. Greater than or equal to sign-These are used in boolean statements to create a true or false output. It takes two numbers and compare them and if the input is bigger than or equal to the set number than it will output true.
11. Less than or equal to-These are used in boolean statements to create a true or false output. It takes two numbers and compare them and if the input is smaller than or equal to the set number than it will output true.
12. Tetrix motor forward-It sends electrical power to the tetrix dc motor and make it spin.
13. Tetrix motor brake-his makes it so the motors will stop moving and it is used as a brake.
2. Touch Sensor (pressed)- When the touch sensor is pressed a certain part of the program will run.
3. Timer- Can be used to have the robot do something for a certain period of time
4. Lamp on-Depending on the on or off state will send electricity to the lamp you have set up on the
port you put the lamp in.
5. Steering-This will make the robot turn depending on the way you set up the power and ports.
6. Wait for Touch Sensor- It waits for what ever button you have it set up to read to be pressed.
7. For loop- The programming inside of this will loop a certain number of times.
8. Case Structure-It reads a Boolean statement and depending on whether or not the statement is true or false it will do a different case that you have set up in the true and false. It can also be expanded into more than two cases.
9. While loop- This will continue to do whatever is inside of the loop while the boolean statement at the bottom right hand of the structure is true.
10. Greater than or equal to sign-These are used in boolean statements to create a true or false output. It takes two numbers and compare them and if the input is bigger than or equal to the set number than it will output true.
11. Less than or equal to-These are used in boolean statements to create a true or false output. It takes two numbers and compare them and if the input is smaller than or equal to the set number than it will output true.
12. Tetrix motor forward-It sends electrical power to the tetrix dc motor and make it spin.
13. Tetrix motor brake-his makes it so the motors will stop moving and it is used as a brake.
dentify and explain the eight steps of the engineering design process
Step 1- Identify Problem- Identify what the problem is you have to solve
Step 2- Research the Problem - Learn more about the problem and ways to solve it
Step 3- Develop Possible Solutions - Create several possible solutions
Step 4- Find Best Solution - Choose the best possible solution
Step 5- Make a Prototype - Build your first prototype
Step 6- Test Prototype - Test your prototype to see if it works
Step 7- Communicate the Solution - Show your prototype and solution on your weebly website
Step 8- Redesign if Needed - If you need to redesign your prototype to solve the problem
Step 2- Research the Problem - Learn more about the problem and ways to solve it
Step 3- Develop Possible Solutions - Create several possible solutions
Step 4- Find Best Solution - Choose the best possible solution
Step 5- Make a Prototype - Build your first prototype
Step 6- Test Prototype - Test your prototype to see if it works
Step 7- Communicate the Solution - Show your prototype and solution on your weebly website
Step 8- Redesign if Needed - If you need to redesign your prototype to solve the problem
Roach Bot
Line follower
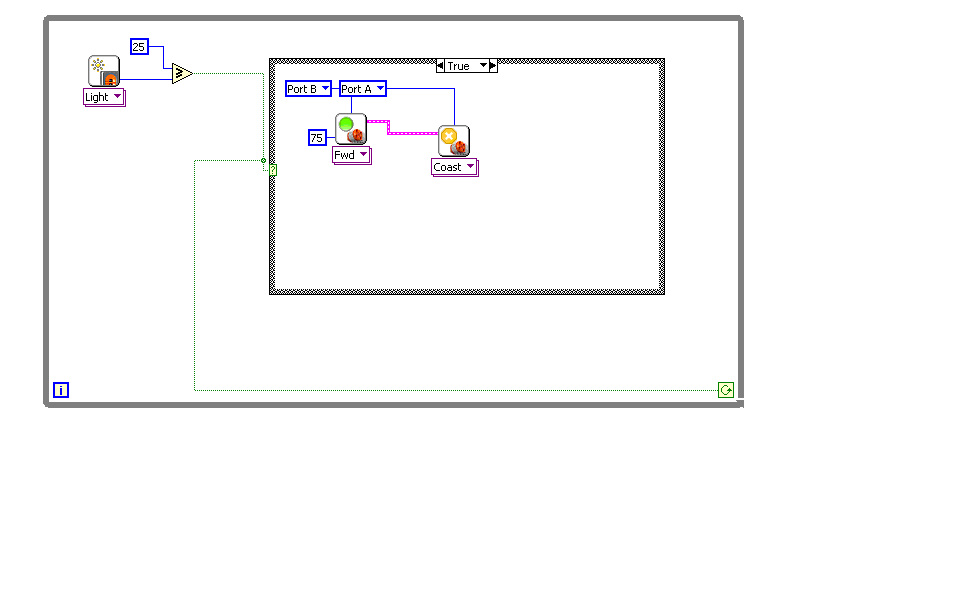
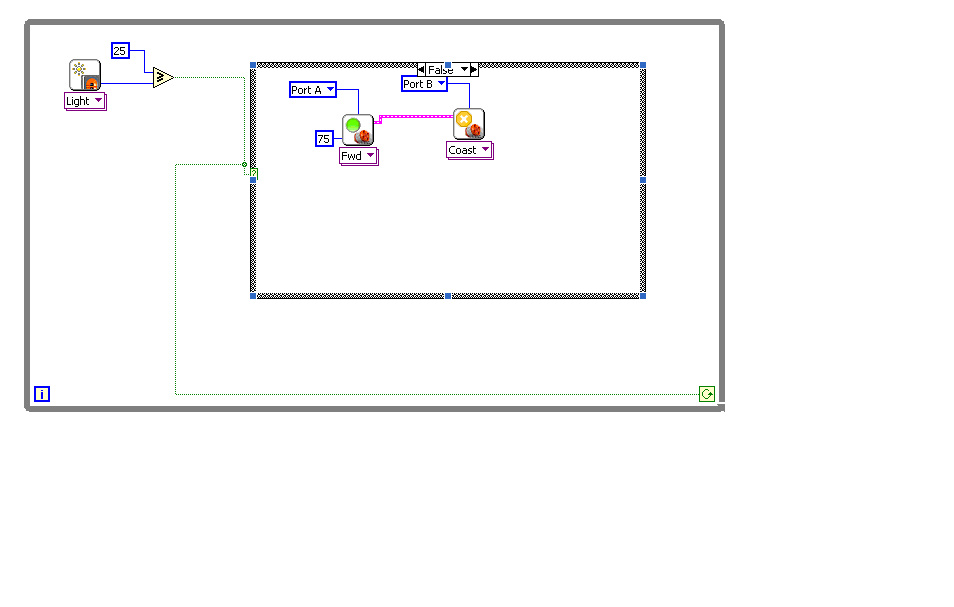
Table bot
Parking bot
CLapper bot
Obstacle bot
Circle bot
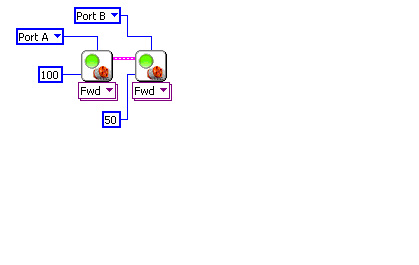
A big gear driving a small gear makes the robot move faster.
A small gear driving a big gear makes the robot move slower.
A small gear driving a big gear makes the robot move slower.
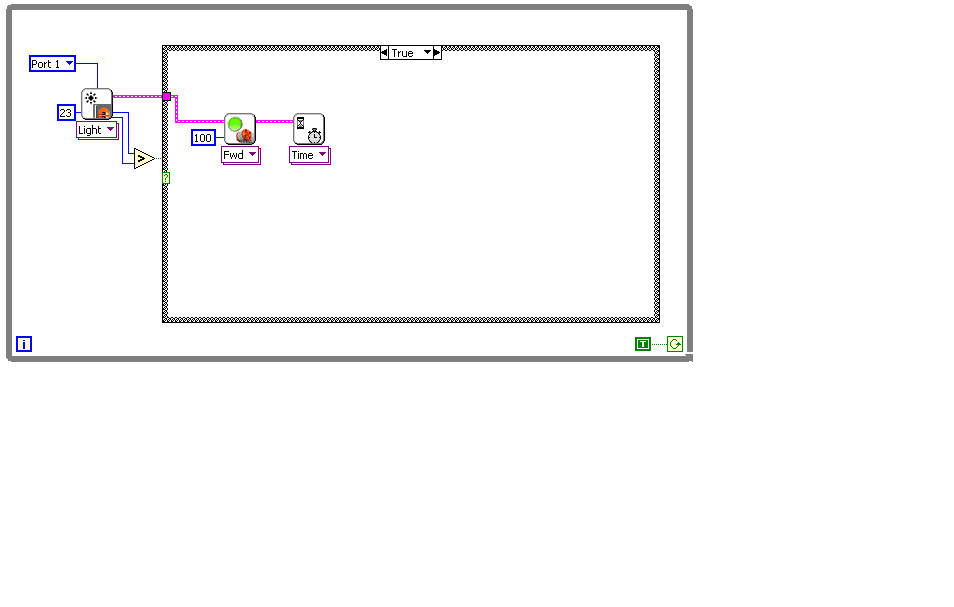
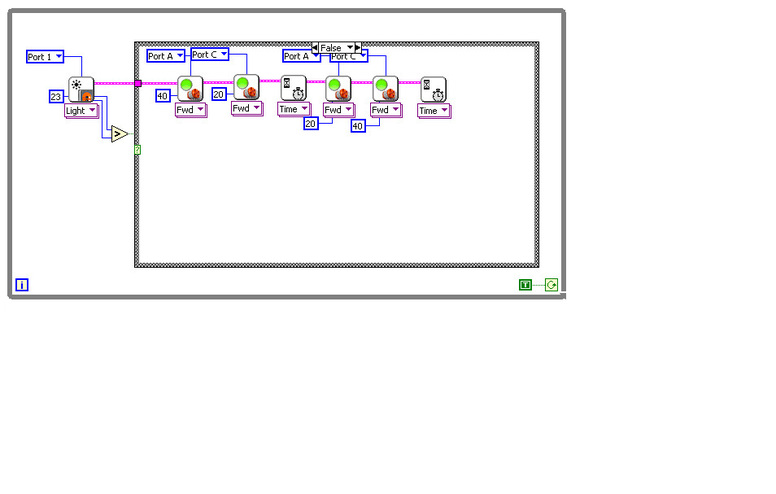
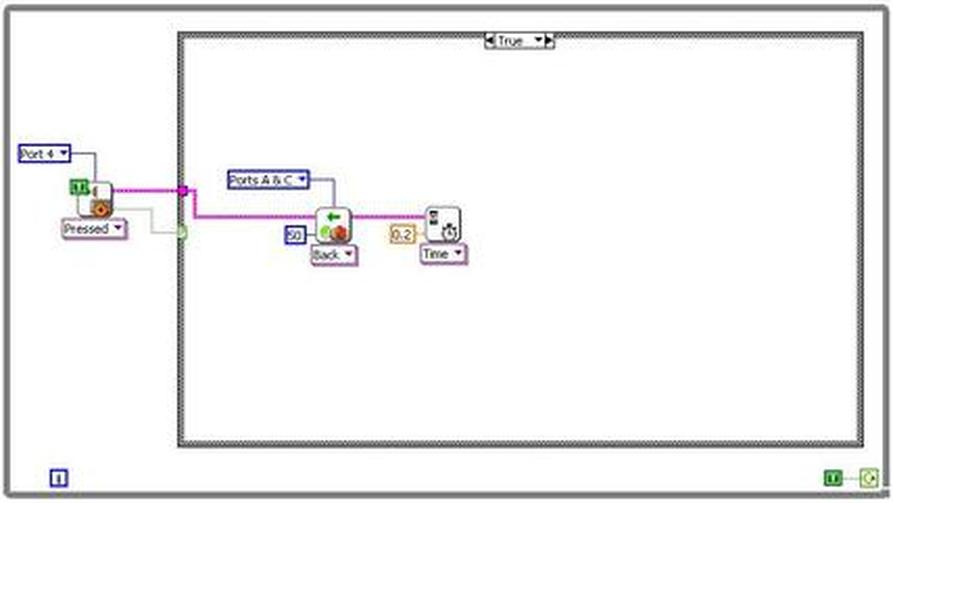
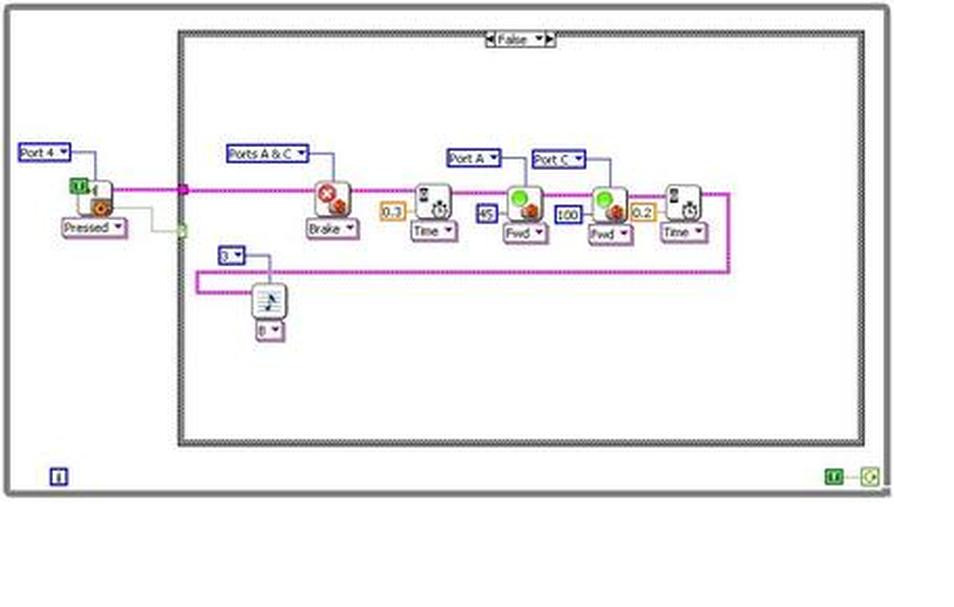
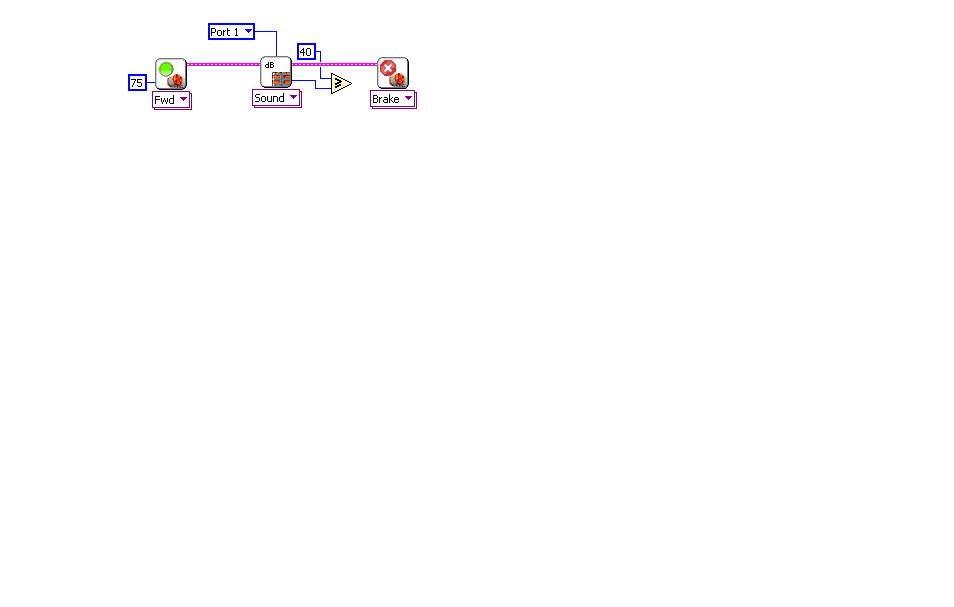
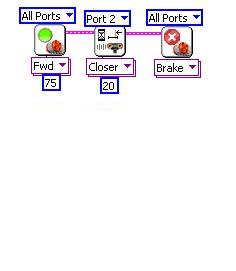
What does this computer code do?
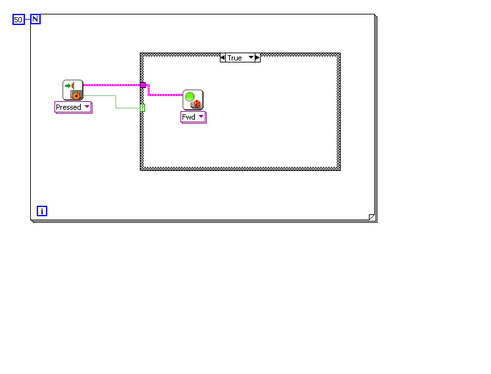
This program will loop 50 times. When the button is pressed the bot will move forward.
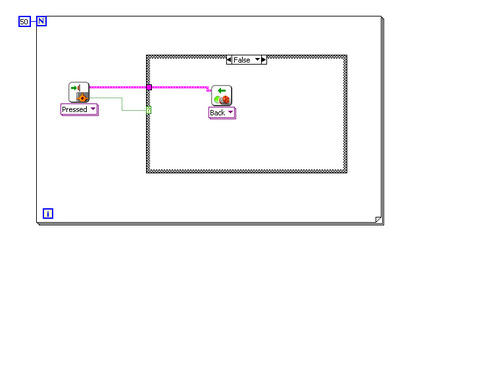
This program will loop 50 times. When the button is not pressed the bot will not move forward.
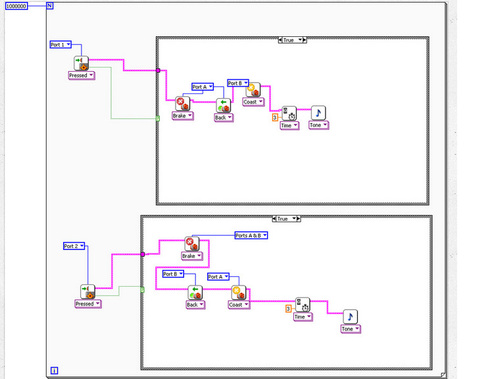
This program will loop for 1000000. When the button is port one is pressed the motor in port A will brake and then move backwards and the motor in port B will coast. This will run for three seconds before it makes a sound.
This program will loop for 1000000. When the button is port two is pressed the motors in port A and B will brake and then the motor in port B move backwards and the motor in port A will coast. This will run for three seconds before it makes a sound.
This program will loop for 1000000. When the button is port two is pressed the motors in port A and B will brake and then the motor in port B move backwards and the motor in port A will coast. This will run for three seconds before it makes a sound.
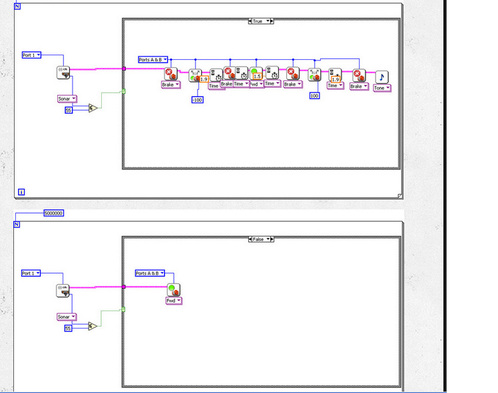
When the sonar sensor detects an object less than or equal to 55 cm away the bot will brake the motors in port A and B before turning left for 1.9 seconds before moving forward for 1.5 seconds and then braking. Then the bot turns right for 1.9 seconds and then brakes ad makes a sound.
When the sonar sensor does not detect anything less than or equal to 55 cm away it will move forward until it does.
When the sonar sensor does not detect anything less than or equal to 55 cm away it will move forward until it does.
