The challenge
We had to design a bot that could be able to visit colored circles in a specific order, identify what color the circle is, and then drop a bot of the same color as the circle into the circle.
input factors
To build and program this bot we needed to have an understanding of how to use a color sensor as well as how to use a gyro sensor.
Bot Prototype 1
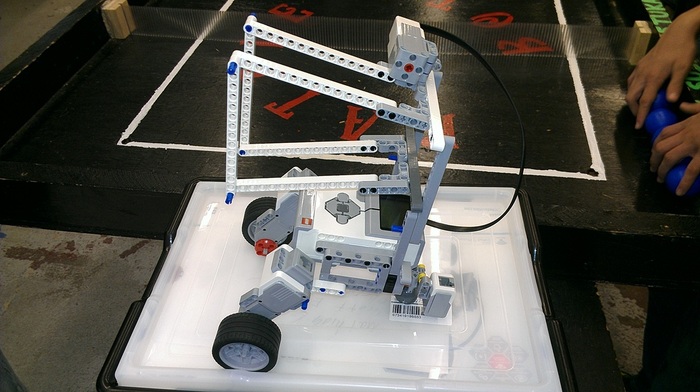
Our fist bot was built with the idea that we could store the balls on top of the bot and just push them out as needed. The bot is equipped with a color sensor to detect the color of the circles as well as a gyro sensor to enable the bot to turn more precisely.
Bot Prototype 2
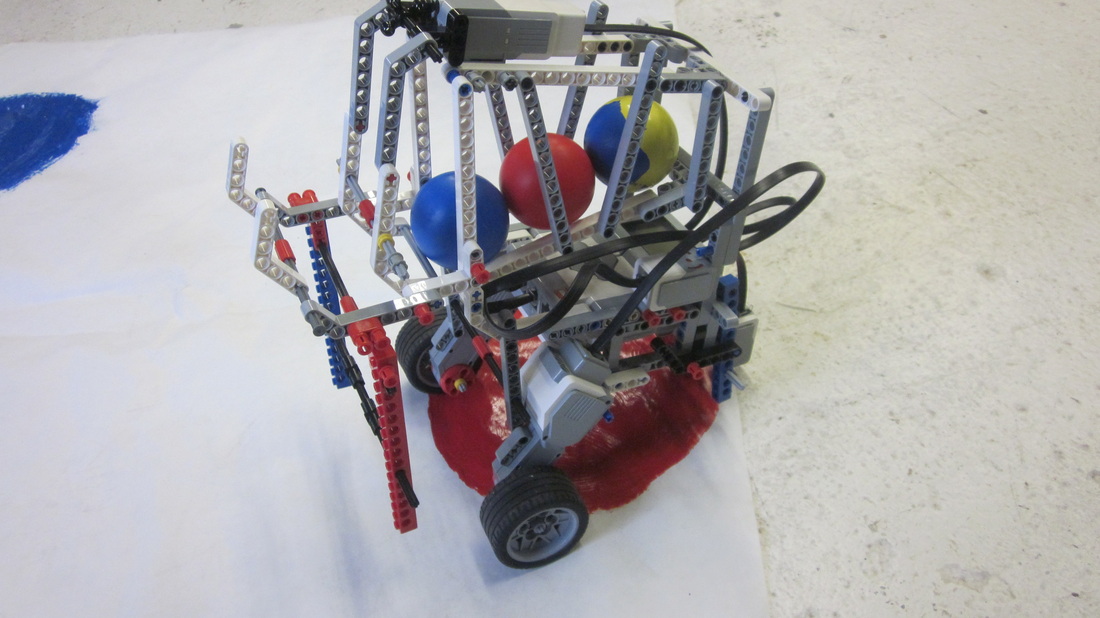
This bot was changed a great deal from its ordinal idea. Instead of pushing the balls out from the back as needed, we moved the motor to the opening where the balls would roll off the ramp and added a door of sorts and barrier to keep the balls from dropping the floor and bouncing away from where we wanted to drop them. We also added a barrier to the sides of the ramp to prevent balls from falling out. The ramp was also attached to the bot in a more secure fashion to prevent it from coming off.
Programing
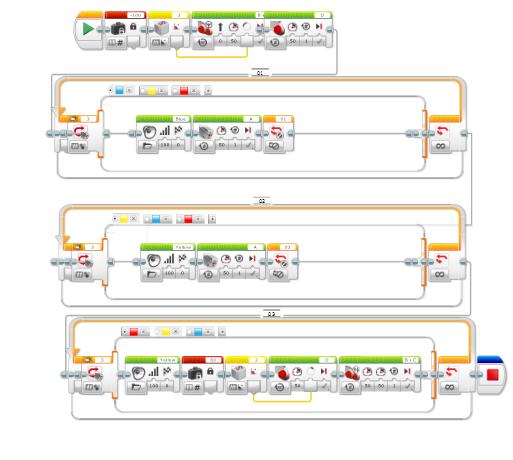
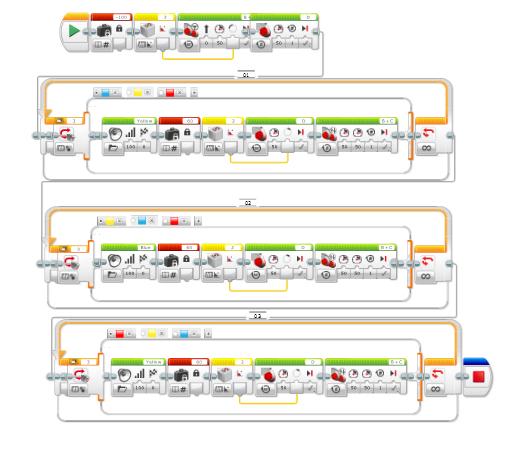
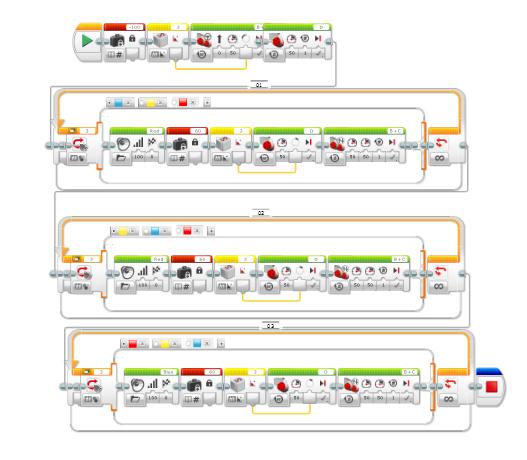
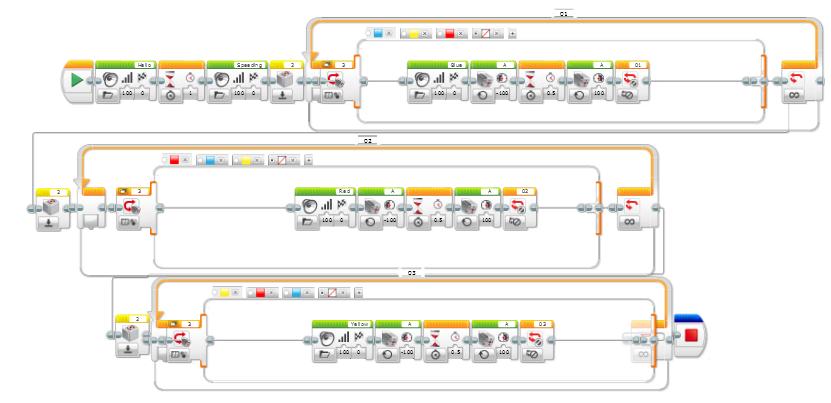
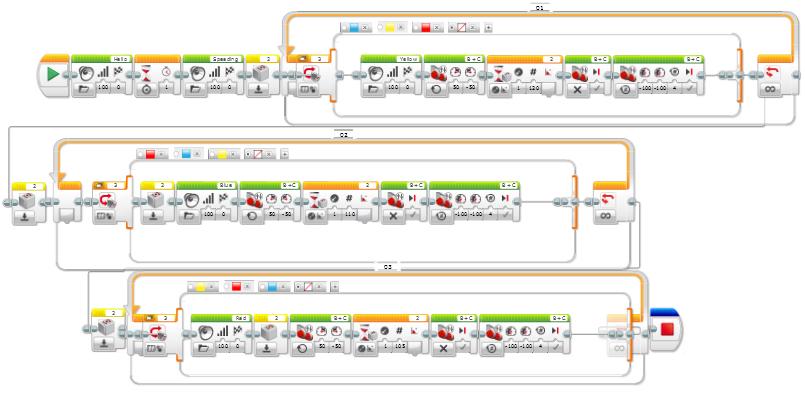
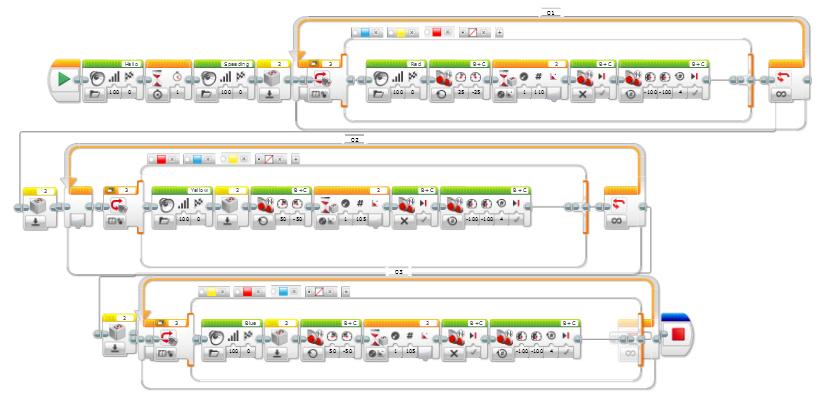
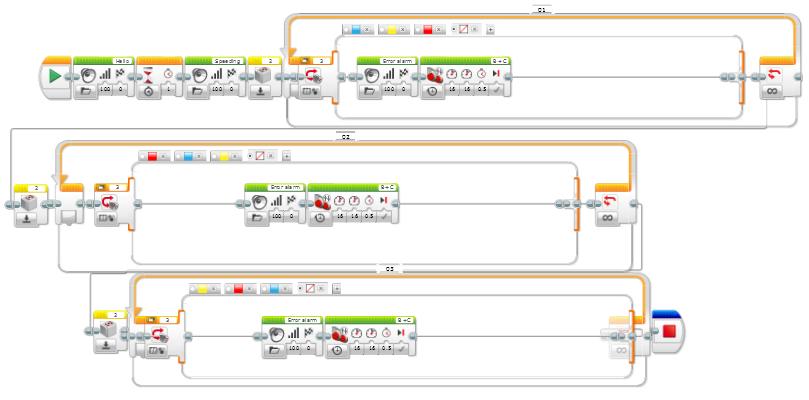
Our program is able to differentiate between red, blue, yellow and white perform a certain function when the corresponding color is detected. The changes we made to the program as we built our bot consisted of changing the degrees for each of the turns so the bot would be able to successfully reach each circle. We also added a set of commands for when white is detected in which the bot backs up until it detects red,blue or yellow.
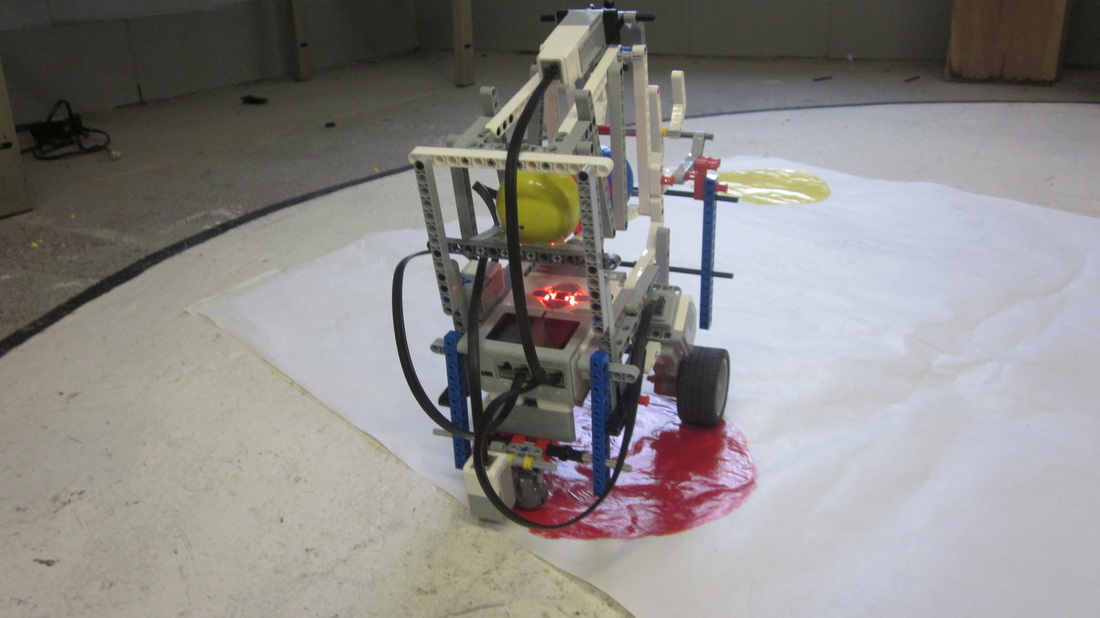
Final output
The final output is a bot that can differentiate between colors and drop a ball corresponding to the color of the circle the color sensor has detected.
feedback
We received positive feedback on the programing that was used for the challenge.
What I learned
I learned how to better program with the new EV3 programing as well as how to use a gyro sensor.
What I would do differently
There is not anything I would do differently.
