The challenge
The challenge was to build a bot able to pick up a cup filled with parts and transport it without spilling across two 3 inch gaps and 18 feet.
input factors
There was not anything I needed to know before building this bot.
the bot
The bot that we built uses skids in the front and the back to prevent the bot from getting stuck in any of the table gaps. It uses an NXT motor to open and close the claw used in grabbing the cup. Our bot uses two EV3 motors to move the tank tracks connected to them. The tank tracks themselves did not have a great deal of grip or traction to them so several 1 by 3 straight connector pieces were added to improve this.
programing
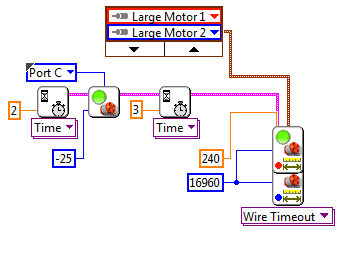
|
The program is relatively simple. The two second wait time is merely there to give the person starting the program time to get the cup in place and get the bot pointed the right way. After two seconds the motor in port C closes the claw and waits three additional seconds to ensure the bot is angled correctly down the table. Finally the bot will turn the tank track's wheels 16960 degrees forward, which is about 18 feet and 6 inches. The wire timeout doesn't indicate anything of particular importance, it was simply a work-around to get the fixed distance block to work.
|
final output
The final output is a bot capable of picking up a dixie cup full of small paarts and moving it across 18 feet with an additional six inches in gaps without spilling anything.
feedback
I did not receive any feedback.
what I learned
I learned out to get the fixed distance block to work with an EV3 brick.
what I would to differently
There is nothing I would do differently.
