The article
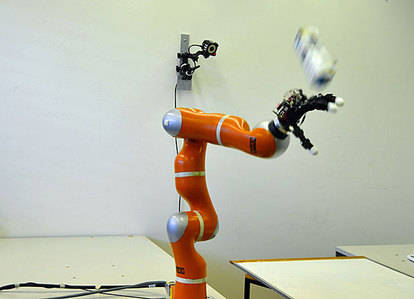
Make and programming robots to catch stuff is hard. Really, really hard. I'm grateful that it isn't my job to do that. The people at the Learning Algorithms and Systems Laboratory at EPFL aren't as lucky. However, they've seem to making magic by leveraging fast vision, fast computers, fast controllers, fast motors, programming by demonstration, and object modeling to be able to snatch unpredictably unbalanced flying objects straight out of the air. Basically what the bot does to catch things like this, the robot creates a model of the object that it's about to try to catch, while the object is flying through the air after having been thrown from just a few feet away.
future inplications
This mainly would affect any robot that has to deal with moving objects that don't have any preset or static movement pattern. It would also improve upon robots that fly or hover and have an arm attached. They would be to be better able to pick up whatever they need to.
