The challenge
We had to built a bot that was capable of locating and transporting a bottle from a hidden location to a designated area.
Input Factors
We needed to know or learn how to build a stable platform for an object as well as how to utilize a claw in your robot's design.
Prototype 1
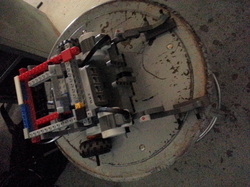
This bot was built with two indepentedly driven wheels and skids to support the bot. There is also a platform for the wireless video camera. However, this bot was not built with a claw to pick up the bottle.
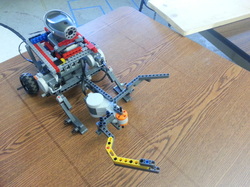
Prototype 2
This bot was modified with a simple claw designed to grab the bottle and transport it. There were no other changes made to the bots design
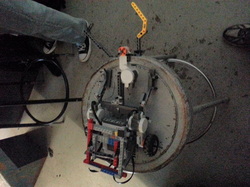
Prototype 3
This bot had its claw modified to prevent from closing incorretly. The platform for the wireless camera was shifted to the left to offset the size of the bottle and allow for increased visablity.
final output
The final bot is a bot that can be controlled via a remote and locate and retrive a bottle.
What I learned
I learned how to built a bot with a stable platform for an object as well as gained a better understanding of how remote controlls can be implimented to solve a problem.
What I would do diferently
There is not anything I would do differently about the bot's design.
