The challenge
The challenge that my partner and I decided upon was a autonomous bot that would be capable of knocking down a water bottle.
Input factors
We needed to know how to program with case structures as well as have some basic understand of how a crossbow works.
Bot platform
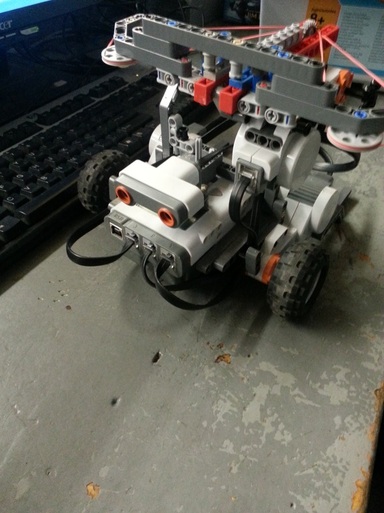
Prototype 1

This is a rather simple bot with skids in the back for support, two possible areas to mount the crossbow, as well as the ability to adjust the position of the ultrasonic sensor.
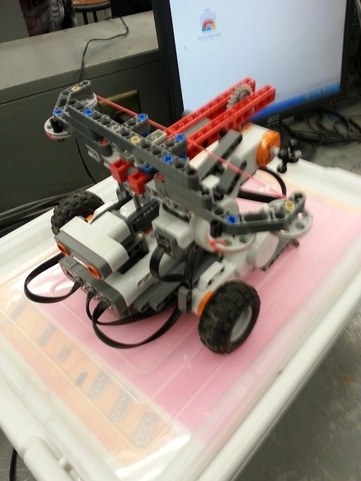
Prototype 2
This is the same bot as before however, the crossbow has now been mounted and some wires have been shifted as to avoid entering the ultrasonic sensor's vision and trigger the program to fire accidentally.
Prototype 3
While there were not any changes made to the bot platform itself, the elastic we had been using snapped. While thinking of how to remedy this we came up with a different version of the crossbow that allowed to us change the amount of force with which our choice of projectile was fired.
Crossbow
prototype 1

This first attempt at making a crossbow was a more of a basic working prototype to see if making a crossbow would be possible. We had put the elastic band we used on wheels to reduse the stress placed upon it when it was drawn back. We also had a large gear attached to the motor to at as the release mechanism. The projectile we had used for this was an axle.
Prototype 2
This bow was modified to fire bars due to the low success rate we had with axles. The firing channel was widened to fit the bars properly. We also had twisted the rubber band in the middle several times to increase string tension which resulted in an increase in the crossbots shots. The motor was lowered ing a second gear was added due to the inabillity of the gear to hold the rubber band without slipping. There was also a small turn wheel added to the oppsite side of the gear on the motor to assist in testing.
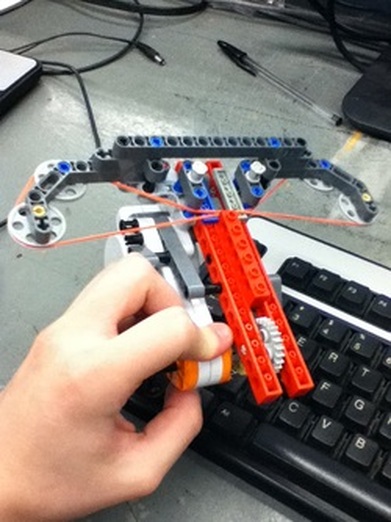
prototype 3

This version was a result of the rubber band we were using breaking and we decided to work with what he had rather than wait to get another rubber band. We made an improved version of our crossbow using the broken rubber band. The crossbow could now adjust the string tension on the rubber band through the wheels attached to the bow by turning them to increase or decrease sting tension.
Program prototype 1
Programing (True)
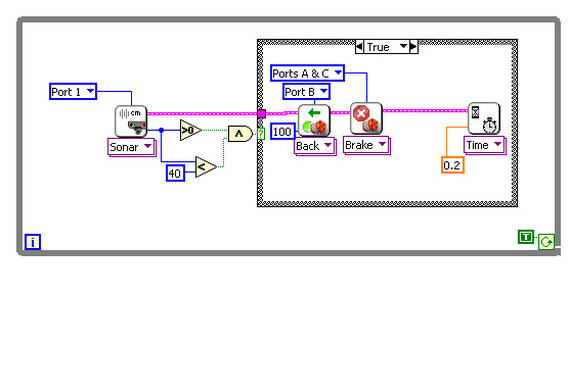
This part of the program tells the bot that if it detects a value between 0 cm and 40 cm to stop and then fire the crossbow. The program will check these values every 0.2 seconds.
Programing (false)
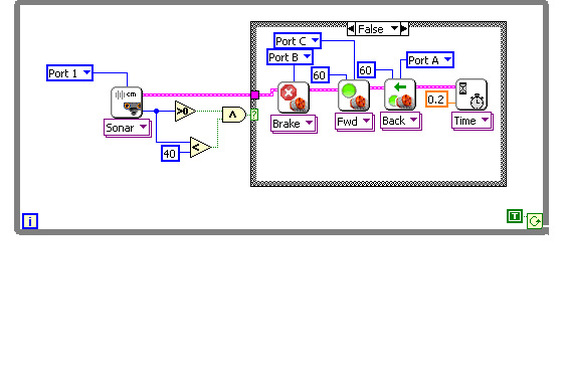
This part of the program tells the bot that if it does not detect a value between 0 cm and 40 cm to spin in a counter-clock wise direction until it does detect something within those values.The program will check these values every 0.2 seconds.
Final output
The final output is a bot that can fire a axis and knock down a plastic water bottle autonomously.
Video demonstration
GOanimate video
Reflective Entry
During this design challenge when programming my robot to perform a task autonomously I was able to gain an better understanding and appreciation of technology and similar to what is present in our culture and society. Through this I was also able to solve problems with LabView and use mathematics, scientific principles and transfer of skills to solve problems. It also allowed me to better understand the effect technology has on our society, culture, and environment and how it can improve our quality of life.
I develop an increased understanding of the attributes of design.
During the design challenge I was able to develop an understanding of engineering design.
As well as develop an understanding of the role of troubleshooting,
research and development, invention and innovation, and
experimentation in problem solving. This design challenge allowed me to learn to better apply the design process. I found my ability to access the impact of products
and systems had improved as well.
This deisgn challenge gave me a better understanding and ability to use LabVIEW software as a tool to program robots to solve a problem or a need. Through the joint efforts of my partner and I we have become more proficient at designing and building a prototype robot. We found an improvement in our understanding of how to implement modifications to the robot prototype until a satisfactory solution is developed. My partner and I were able to collaborate effectively as members of a design team. I gained the knowledge of how to use Goanimate software to tell our story of learning. We had also learned that the world is changing rapidly and your ability to problem solve, collaborate, be patient , be a nice person, and become a continuous learner carry over to all facets of learning and life.
I develop an increased understanding of the attributes of design.
During the design challenge I was able to develop an understanding of engineering design.
As well as develop an understanding of the role of troubleshooting,
research and development, invention and innovation, and
experimentation in problem solving. This design challenge allowed me to learn to better apply the design process. I found my ability to access the impact of products
and systems had improved as well.
This deisgn challenge gave me a better understanding and ability to use LabVIEW software as a tool to program robots to solve a problem or a need. Through the joint efforts of my partner and I we have become more proficient at designing and building a prototype robot. We found an improvement in our understanding of how to implement modifications to the robot prototype until a satisfactory solution is developed. My partner and I were able to collaborate effectively as members of a design team. I gained the knowledge of how to use Goanimate software to tell our story of learning. We had also learned that the world is changing rapidly and your ability to problem solve, collaborate, be patient , be a nice person, and become a continuous learner carry over to all facets of learning and life.
Feedback
We did not receive any feedback.
what I learned
I learned how to program a bot to perform a task autonomously with the use of a ultrasonic sensor.
What I would do differently
There is not anything that I would do differently.
