Line Follower Bot
The Challenge:
The challenge for this bot was to build and program a robot that could follow a black line on a white floor.
Input Factors: The bot will need to be able to tell the difference between black and white in order to follow the line. The sensor that will be used to do this will be the light sensor. The bot will also need to turn in order to follow the line. This mean that the bot cannot have more than two fixed wheels otherwise turning cannot be done.
The Process: The first thing my group and I decieded to do was to look up some designs of what others have done. We used these designs to create a rough idea of the robot's structure. We had decided to have two independent wheels each powered by one motor. We then added skis to the front and back for support. These skis enabled the bot to turn without using fixed wheels.
Final Output: The bot was able to follow the line and turn to adjust its course as well as tell the difference between black and white.
The challenge for this bot was to build and program a robot that could follow a black line on a white floor.
Input Factors: The bot will need to be able to tell the difference between black and white in order to follow the line. The sensor that will be used to do this will be the light sensor. The bot will also need to turn in order to follow the line. This mean that the bot cannot have more than two fixed wheels otherwise turning cannot be done.
The Process: The first thing my group and I decieded to do was to look up some designs of what others have done. We used these designs to create a rough idea of the robot's structure. We had decided to have two independent wheels each powered by one motor. We then added skis to the front and back for support. These skis enabled the bot to turn without using fixed wheels.
Final Output: The bot was able to follow the line and turn to adjust its course as well as tell the difference between black and white.
Prototype 1(Final)

The robot is driven by two motors, one for each wheel. The skis in the front of the bot support it while allowing for the ability to turn. The skis in the back are used to keep the bot from flipping over due to the sheer weight at the back of the bot. The light sensor is underneath the bot and detects a change in color of a surface. This allows the bot to follow a set path, such as a black line on a white floor.
Line Follower Program (False)
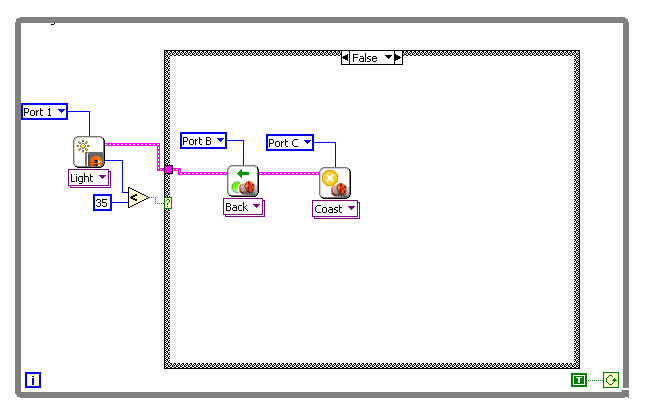
The program about is one part of the whole used to run the line following bot. If the light value read by the light sensor is more than 35 it is considered false it will follow the directions for a false value. The case structure is encased in a loop structure which will cause the robot repeat this behaivor untill manually stopped.
Line Follower Program (True)
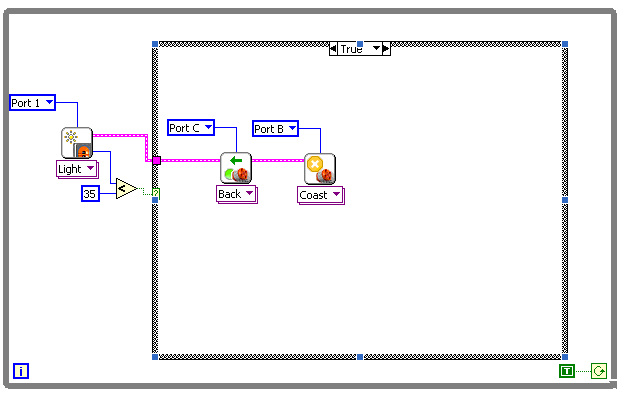
This part of the program is what is run when the light sensor reads a value less than 35, which is considered to be true. The robot will then follow the programing for a reading that is true.
Video Demonstration
http://www.youtube.com/watch?v=8CzlRVsELQU&feature=player_embedded
Things I Learned: I learned how to make a program that could examine its current path and make adjustments acording to set variables in its program.
Things I Would Have Done Differently: I would have used wheels that could swivel instead of skis. I would have done this because the swivel wheels would have been able to aid in turning and would have caused less friction.
Things I Would Have Done Differently: I would have used wheels that could swivel instead of skis. I would have done this because the swivel wheels would have been able to aid in turning and would have caused less friction.
