The Challenge
We had to build a bot that could move accurately between three points and wait at each point for a certain amount of time.
Input Factors
We had to have an understanding of how to put together a program that could make the bot perform a sequence of actions.
The Program
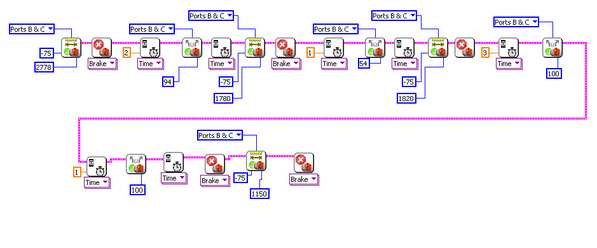
The travels for 2778 degrees of rotation before stopping adn waiting for 2 seconds. Then, the bot turns 94 degrees left and drives for 1780 degrees of rotaion before stopping and waiting for 1 second. Next, the bot turns 54 degrees left and drives for 1820 degrees of rotaion before stopping and waiting for 3 second. Finally, the bot turns left 100 degrees for one second twice before stopping and then driving forward 1150 degrees of rotation and stopping.
Final Output
The final output is a bot caable of moving to and waiting at several points for a period of time.
Feedback
We did not recive any feedback.
What I Learned
I learned more about motors and ways you can use them in progaming.
What I Would Do Differently
There is not anything I would do differently.
